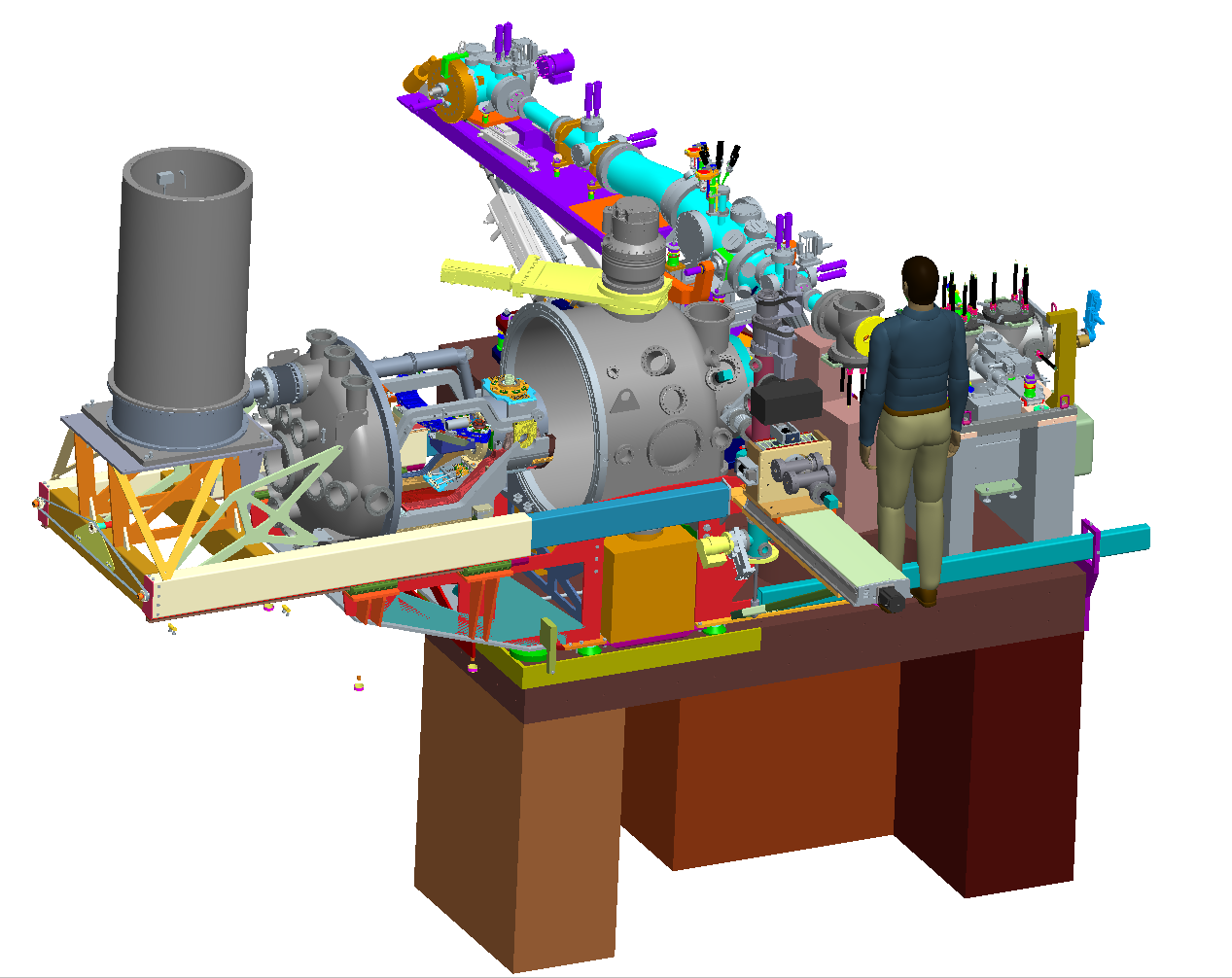
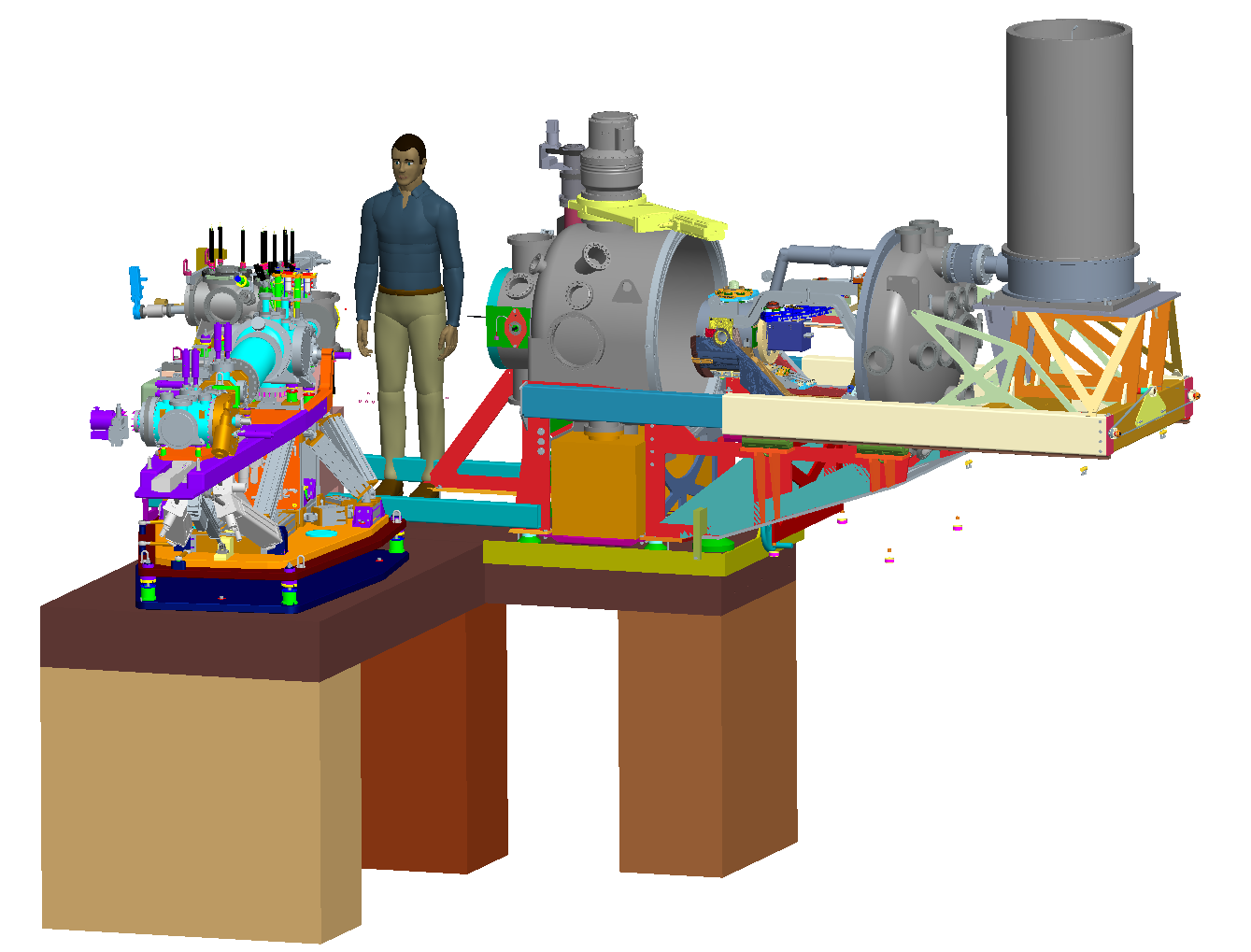
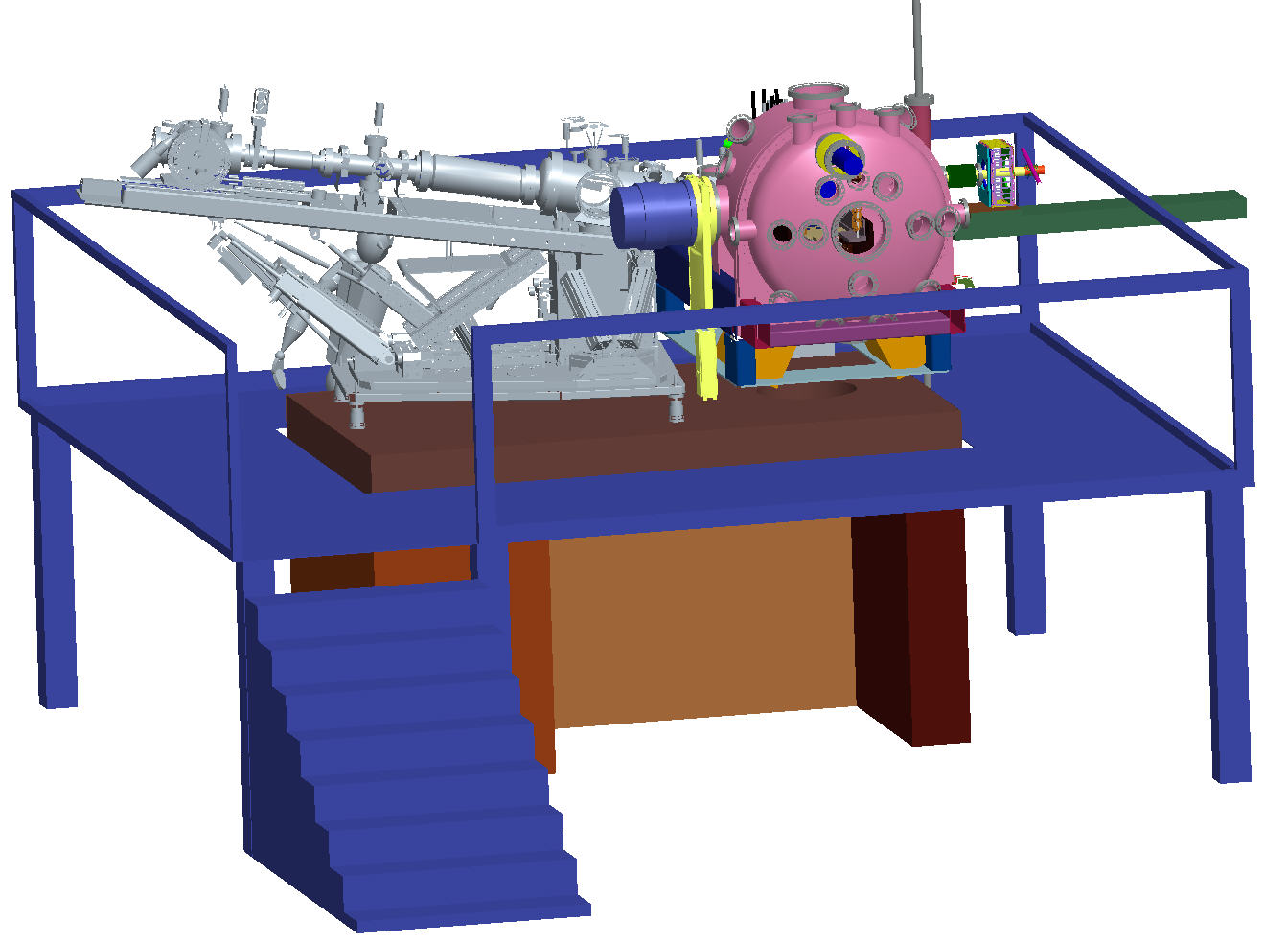
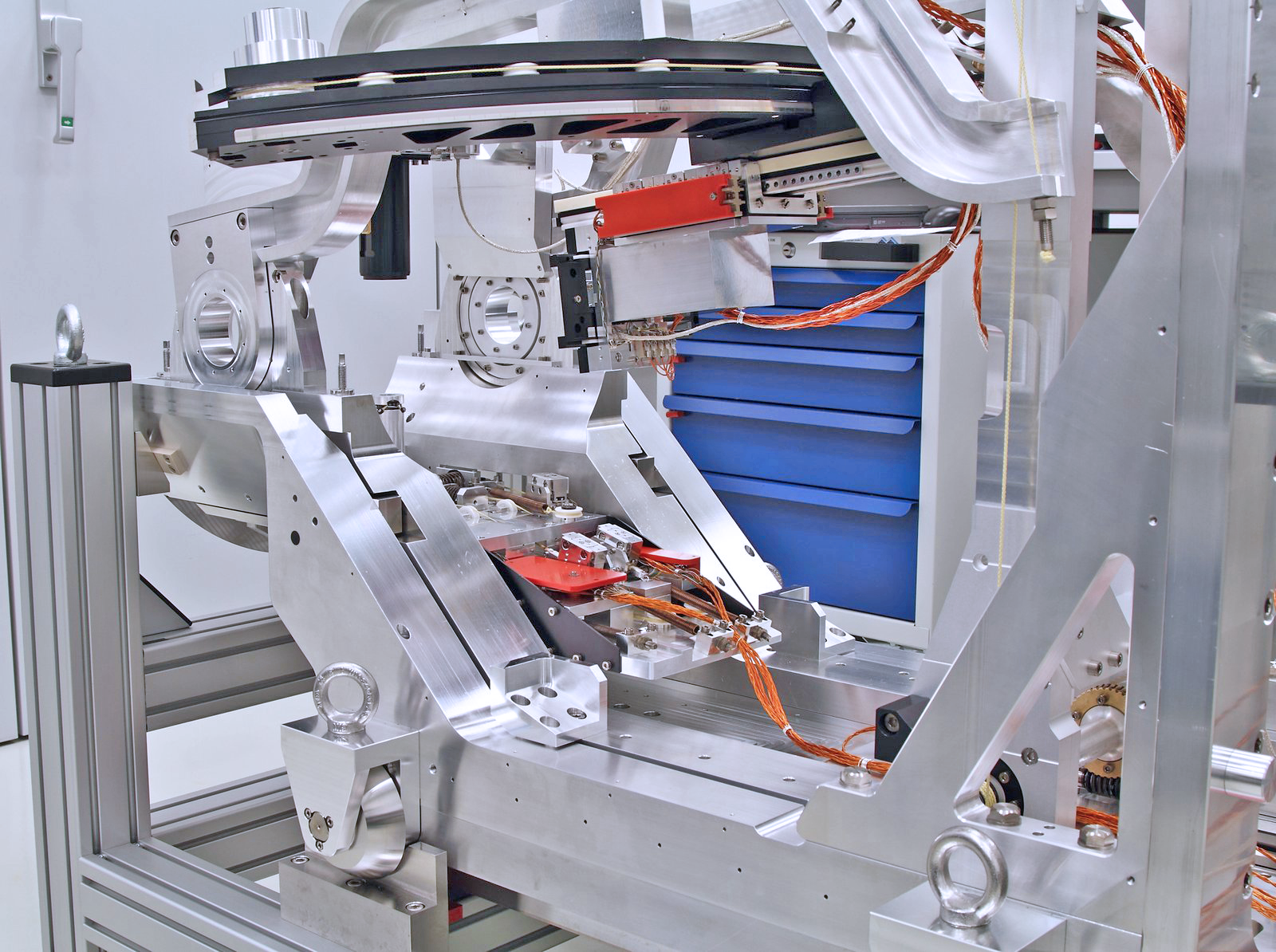
Kameramanipulator (RICXS-Experiment)
Vakuum / Reinraum Mehrachssysteme
782441:001.26
 - Vakuum / Reinraum Mehrachssysteme")



Vakuum-Mehrachssystem
1 Tesla bei 10E-8 mbar (UHV), harte Röntgenstrahlung, 42 Piezomotoren
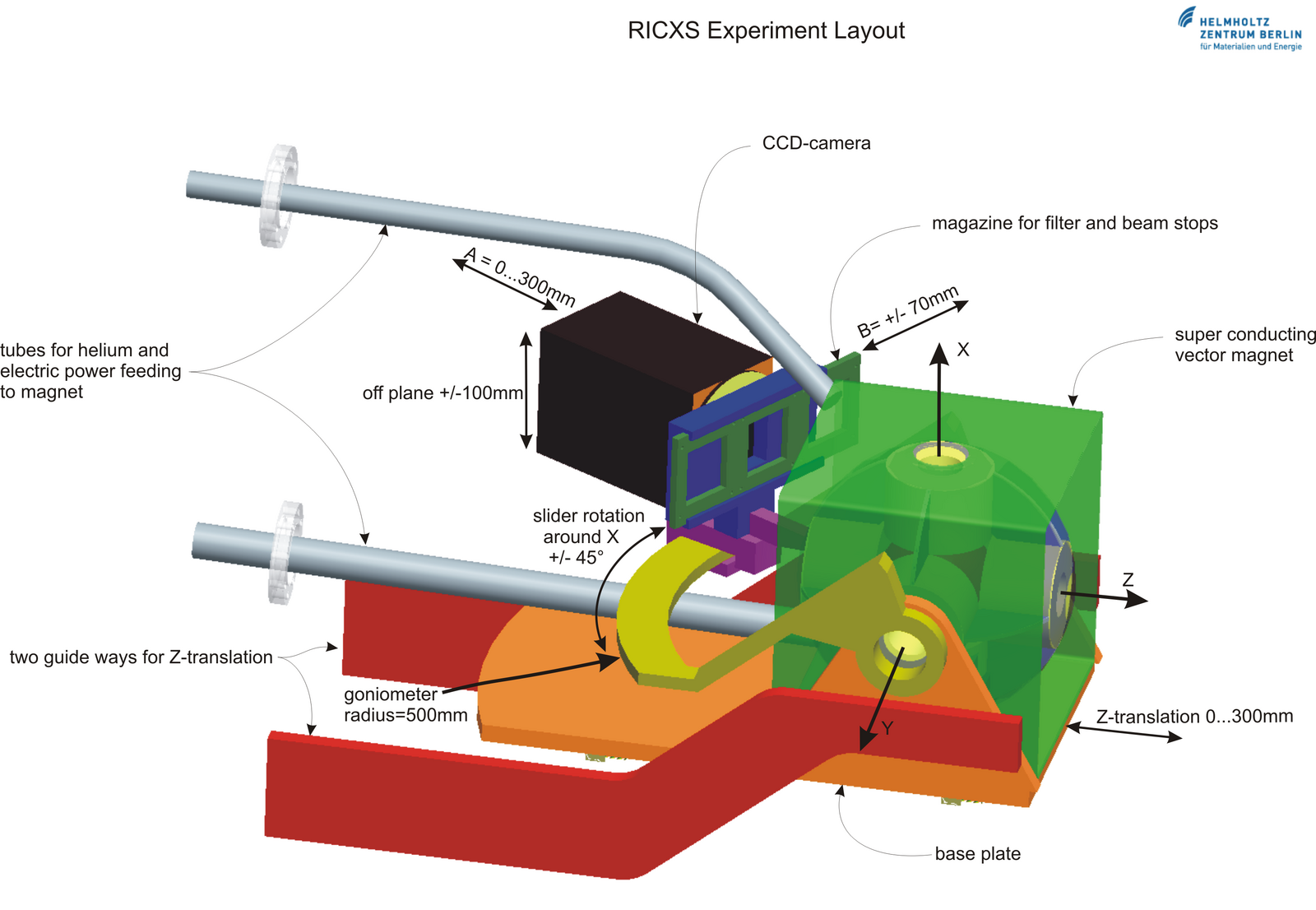
RICXS-Experiment: (Resonant Inelastic X-ray Scattering) am Bessy zur Anwendung in der Synchrotronstrahlungsforschung
- Schwenken einer Kamera um Supermagneten 1T bei 10E-8 mbar
- Verstellung von Betrachtungsabstand, vorgeschalteten Blenden, Proben im Magneten
|
|
|
|
Besonderheit:
|
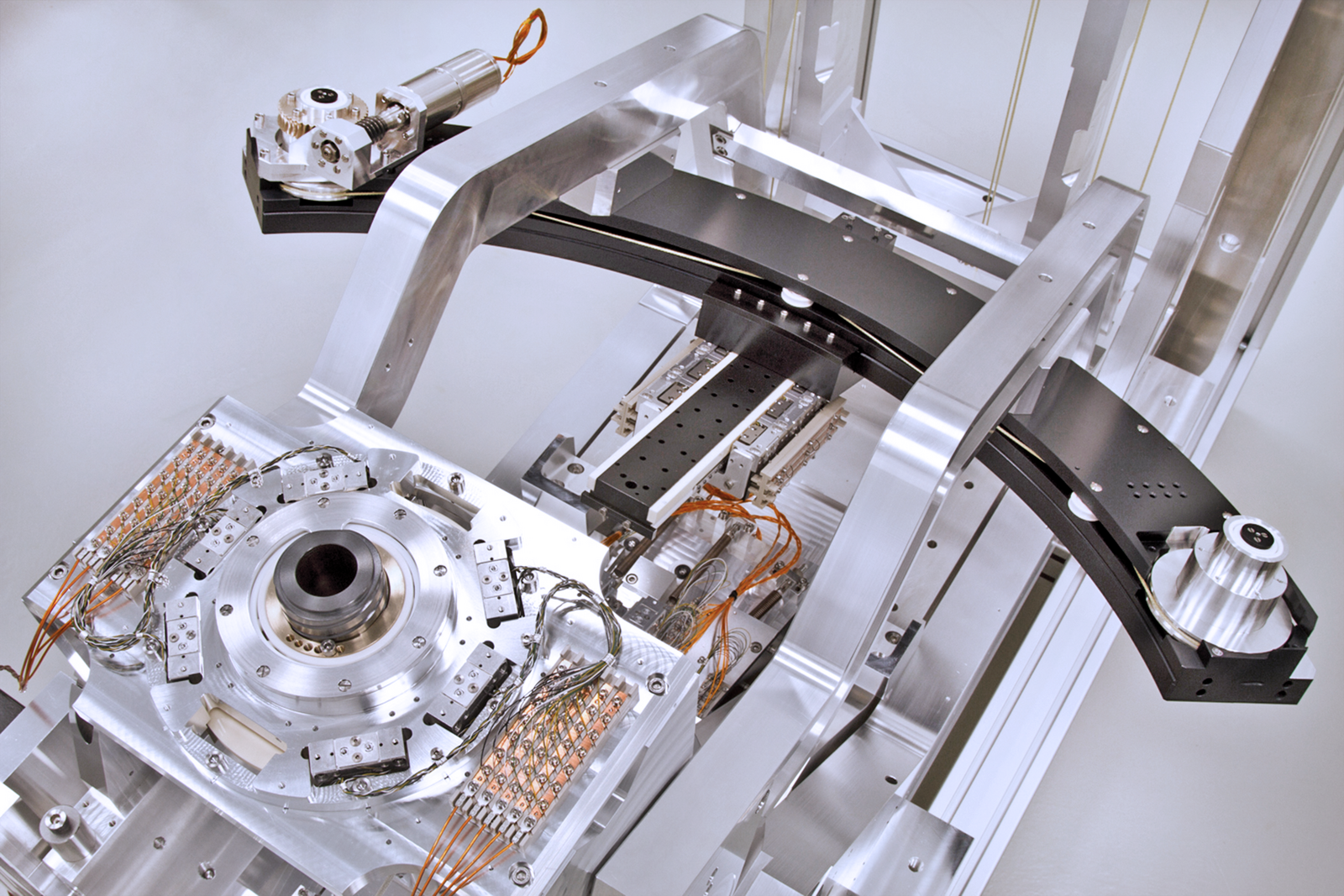
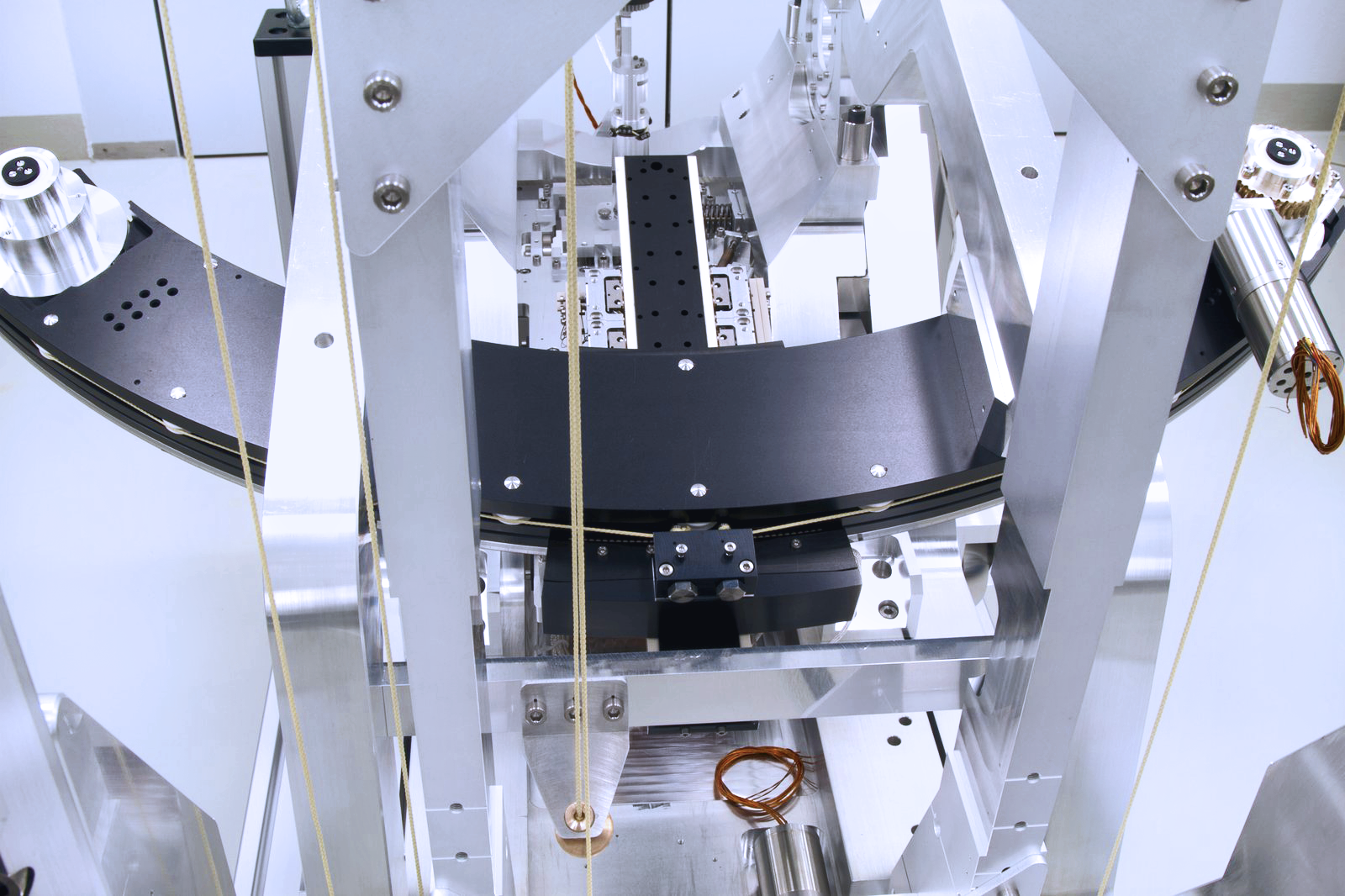
Funktionsweise
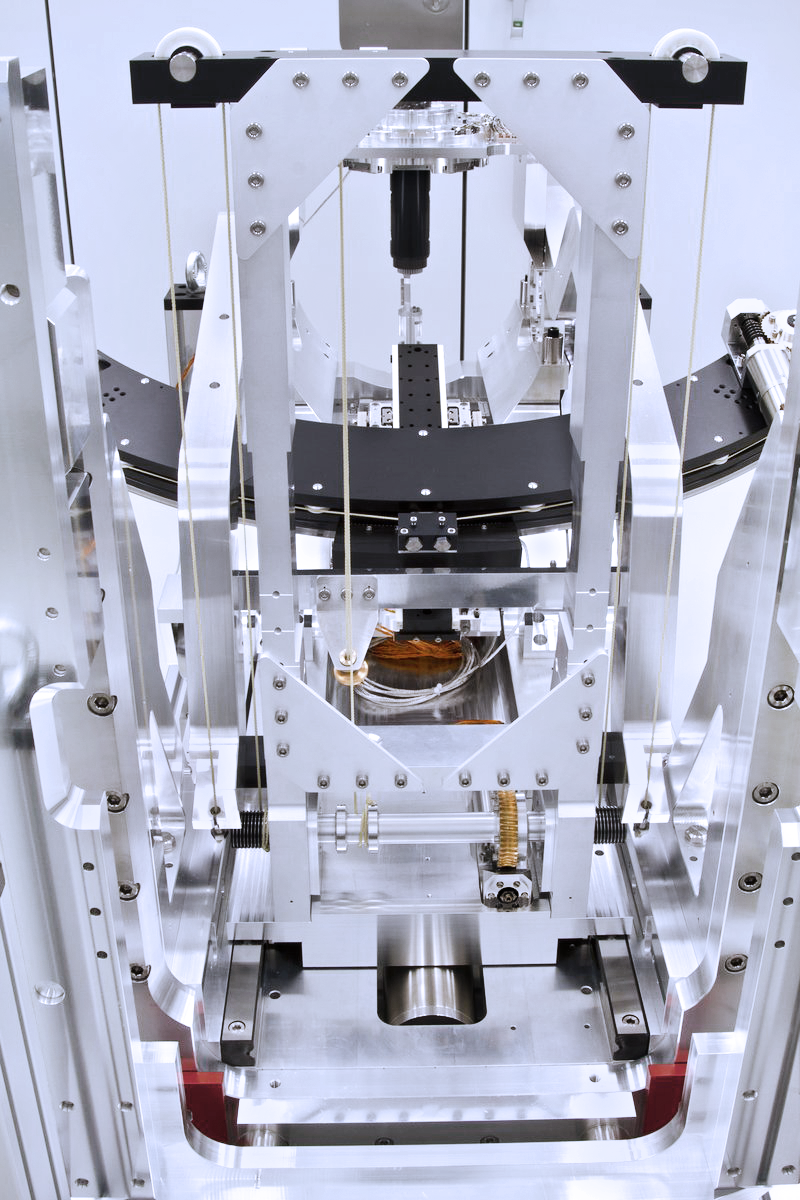
Die Kamera wird in zwei Freiheitsgraden um den Magneten mit der Probe geschwenkt und der Abstand zum Schwenkzentrum ist einstellbar. Der gesamte Aufbau lässt sich im Wartungsfall aus der Vakuumkammer herausfahren (extremes Magnetfeld am Magneten bei 10E-8 mbar)
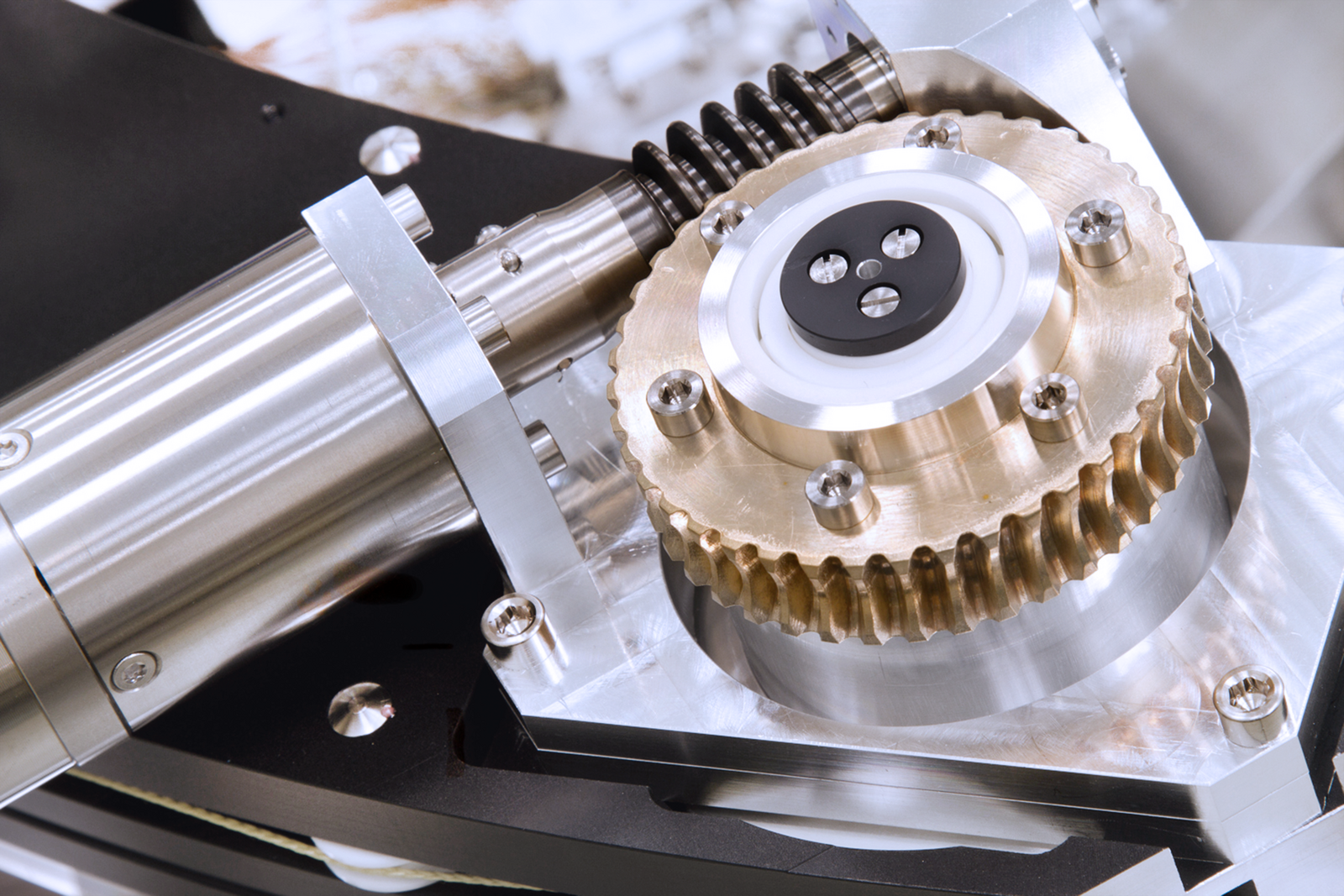
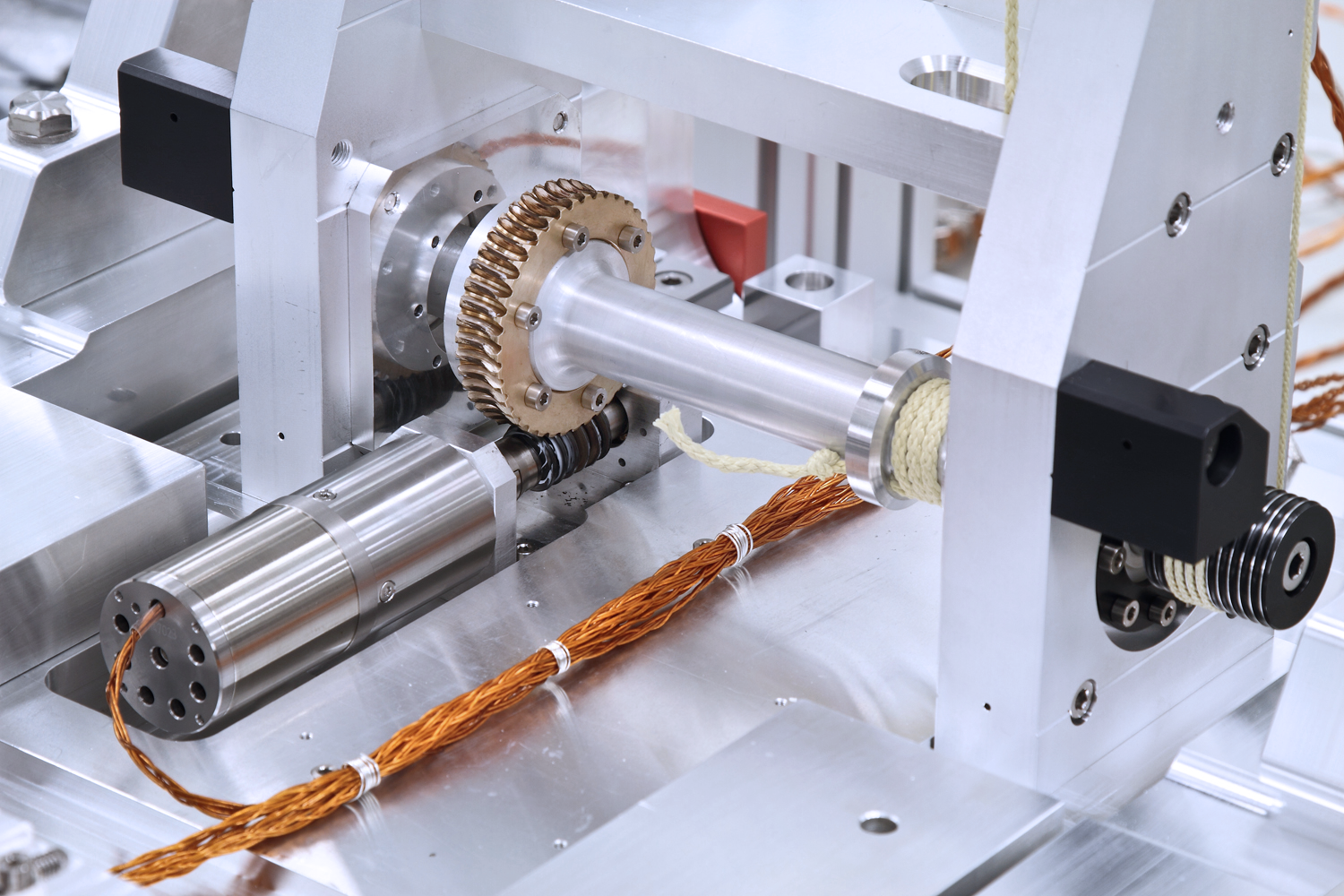
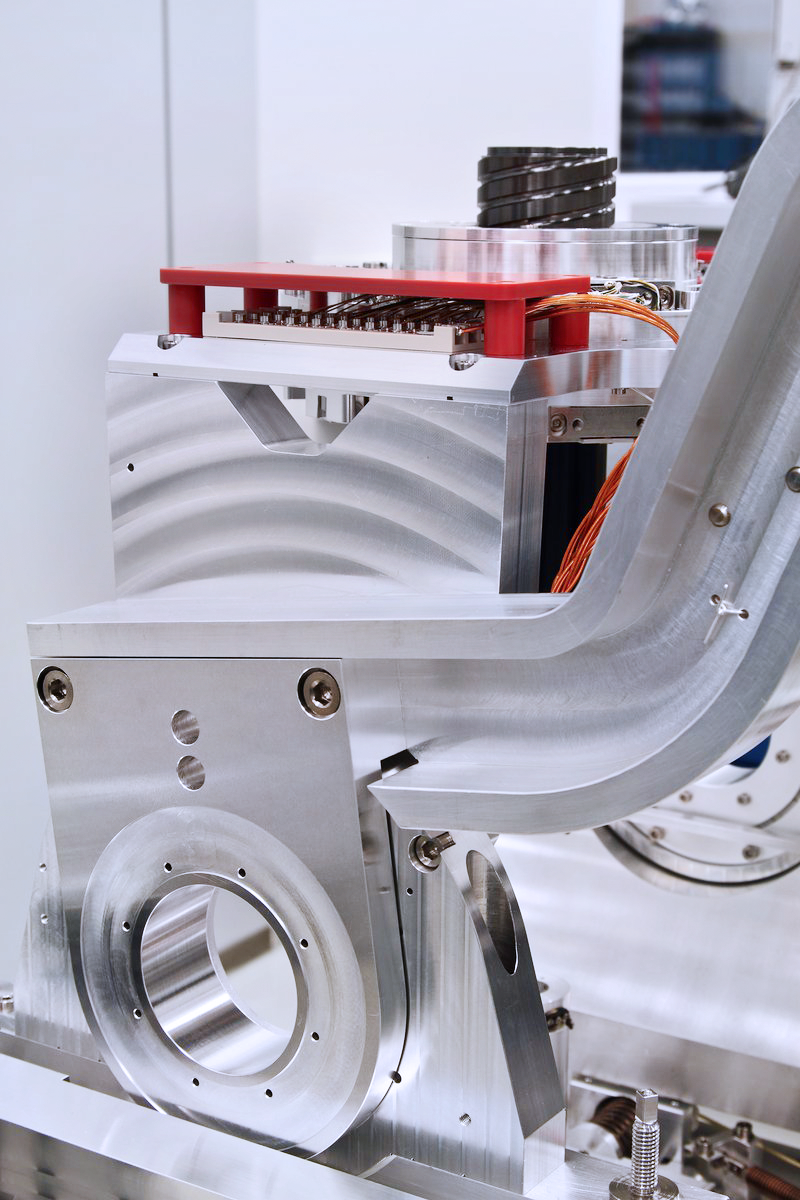
Alle Antriebe nahe am Magnet sind mit Piezomotoren ausgeführt. Es werden dafür mehrere Motoren parallel betrieben, um die notwendigen Kräfte zu erzeugen. Solche Motoren sind im A-Drive, welche die Kamera vor und zurück bewegt und im Blendenversteller vor der Kamera verbaut.
Die Antriebe für die Schwenkbewegungen sind weiter entfernt vom Magnet platziert, so dass hier auch kostenoptimierte Schrittmotoren verwendet werden können. Diese wirken über trockenlaufende Schneckenantriebe und Wickeltrommeln auf Seilschlingen, die letztendlich die Schenkung erzeugen. Dafür musste eine Bogenführung mit umlaufenden PEEK-Kugeln entwickelt werden.
Anwendungsfelder
Magnetfeldmessung, Forschung für die Erhöhung der Speicherdichte auf Festplatten, Forschung, Produktentwicklung, Sichtbarmachen von magnetischen Funktionen in Materialien im aktiven Zustand (man kann dem Magnetismus „zusehen“ und Magnetismus grundlegend besser verstehen)
Referenzen
Über das Experiment (externer Link): https://jlsrf.org/index.php/lsf/article/view/81
Presseveröffentlichung unter www.konstruktion-entwicklung.de (externer Link): https://www.konstruktion-entwicklung.de/magnetismus-an-schaltungen-dreidimensional-sichtbar-machen
| 782441:001.26 | X | Rz | Ry | Xr | y | |
| Bewegung | Zustellung | Schwenkeinheit horizontal | Schwenkeinheit vertikal | Fokus | Blende | |
| Verfahrweg | [mm; deg] | 300 | ± 45 | +5 | -18.5 | 300 | 200 |
| Wiederholgenauigkeit unidirektional | [µm; deg] | ± 5 | ± 0,1 | ± 0,1 | ± 0,3 | ± 5 |
| Wiederholgenauigkeit bidirektional | [µm; deg] | ± 10 | ± 0,2 | ± 0,2 | ± 1 | ± 10 |
| Positioniergeschwindigkeit | [mm/s; deg/s] | 5 | 1 | 1 | 5 | 5 |
| Max. Geschwindigkeit | [mm/s; deg/s] | 10 | 2 | 2 | 10 | 10 |
| Max. Last | [N] | 2500 | 200 | 200 | 100 | 5 |
| Gewicht | [kg] | 1110 | ||||
| Schmierung flüssig | [mbar] | minimal, bis 10-8 | ||||
| Schmierung trocken | [mbar] | bis 10-8 | ||||
| Max. Ausheiztemperatur | [deg] | 80 | ||||
| Antrieb | Kugelgewindetrieb 1432/4.16.398.453BR T7 | Schnecke, Seil | Schnecke, Seil | |||
| Motor | Schrittmotor | Schrittmotor | Schrittmotor | Piezo Motor | Piezo Motor | |
| Feedback | Linearmesssystem | Winkelmesssystem | Winkelmesssystem | Linearmesssystem | Linearmesssystem | |
| Optionale Zusatzausstattung | kundenspezifsche flourfreie / PFAS-freie UHV-Schmierung, Adapter, Bohrungsraster, Kabel / Stecker | |||||
| Varianten Reinraum | bis Reinraum Klasse ISO 6 (höher auf Anfrage) | |||||
| Varianten Strahlung | UV, DUV, EUV, Röntgen (Gamma auf Anfrage) | |||||
| Varianten Magnetismus | magnetisch, magnetarm, magnetfrei im Zentrum | |||||
| Varianten Vakuum | alle Bereiche bis 10E-8 mbar HV / UHV | |||||



Noch mehr Achsen für Ihre Vakuumanwendungen?

Nahezu alle atmosphärischen Standardachsen sind eloxiert mit UHV-Schmierung für Restdrücke bis 10E-6 mbar - oder noch besser - verfügbar. Klicken Sie hier für die Übersicht über unsere Standardachsen!
Nur bestimmte Materialien, Komponenten und Schmierstoffe genügen den Anforderungen an niedriges Ausgasen. Oft ist die Verwendung flüssiger Schmierstoffe nicht möglich. Auch stellt der Ausbackprozess eine hohe Belastung für das Positioniersystem dar, die auftretenden thermischen Spannungen bei Temperaturen bis 140°C müssen beachtet werden. Alle Fertigungsteile werden vakuumgerecht konstruiert und nach der Fertigung gesondert gereinigt. Die Montage erfolgt im Reinraum. Für Systeme mit Magnetfreiheit schränkt sich die Materialauswahl noch wesentlich weiter ein.
Sowohl für UHV-Systeme für höchsten Anspruch als auch für magnetfreie Baugruppen halten wir eine Vielzahl von Lösungen bereit.
Die kundenspezifische Anpassung unserer Positioniersysteme an bestehende Kammern oder Setups erfolgt in mehreren strukturierten Schritten. Ziel ist eine nahtlose Integration bei maximaler Präzision, Reinraum- bzw. Vakuumtauglichkeit und Betriebssicherheit.
Typischerweise umfasst der Anpassungsprozess:
- Analyse der Einbausituation (Bauraum, Schnittstellen, Lasten, Bewegungsfreiheiten, Umgebungsbedingungen)
- Abstimmung auf die Applikation hinsichtlich Vakuum-, Reinraum-, Magnetismus- oder Strahlungsanforderungen
- Mechanische Anpassungen wie kundenspezifische Adapter, Grundplatten, Bohrbilder oder Bauhöhen
- Anpassung von Antriebs-, Mess- und Kabelkonzepten inkl. Steckerführung, Durchführungen und Kabelführung
- Material- und Schmierstoffauswahl abgestimmt auf Ausgasung, Partikelanforderungen und Bake-out
Die Auslegung erfolgt mittels 3D-Konstruktion und Simulation, auf Wunsch ergänzt durch Prototypen, Funktionstests sowie Reinraum- oder Vakuumvorbereitung. So stellen wir sicher, dass das System optimal in das bestehende Setup integriert werden kann – ohne Kompromisse bei Präzision oder Prozessstabilität.
Unsere Positioniersysteme sind für unterschiedliche Reinraumklassen gemäß ISO 14644-1 ausgelegt und können an die jeweilige Anwendung angepasst werden. Standardmäßig realisieren wir Systeme für ISO 6 bis ISO 4. Für besonders anspruchsvolle kundenspezifische Anwendungen sind – abhängig von Systemkonzept, Bewegung, Materialien und Schmierung – auch Reinraumklassen bis ISO 2 - 1 möglich.
Die erreichbare Reinraumklasse hängt dabei unter anderem ab von:
- der gewählten Mechanik und Lagerung
- den eingesetzten Antriebs- und Messsystemen
- Materialien, Oberflächenbehandlungen und Schmierstoffen
- Bewegungsprofilen und Betriebsbedingungen z.B. Einhausung, Absaugung
- Mehrstufige Reinigungsprozesse, Handling & Kommissionierung
Alle Reinraumsysteme werden entsprechend vorbereitet, montiert und endgereinigt im Reinraum. Auf Anfrage entwickeln wir kundenspezifische Lösungen, die exakt auf die geforderte Reinraumklasse und Anwendung abgestimmt sind.
Nahezu alle atmosphärischen Standardachsen sind eloxiert mit UHV-Schmierung für Restdrücke bis 10E-6 mbar - oder noch besser - verfügbar. Für Systeme mit Schritt- oder Piezo Motor bieten wir Vakuum-Präparation:
- Alle Teile vakuumgereinigt
- Flüssigschmierung mit UHV-Öl für Drücke bis 10-6 mbar
- Maximale Ausheiztemperatur 80 °C
- Ausgerüstet mit Phytron-Schrittmotoren
- Edelstahlkomponenten (Kugelgewindetrieb, Führungen, Lager, Schrauben)
- Kapton- oder PTFE-Verkabelung
- Kapton- oder Keramik-Sub-D-Stecker
- Unbehandelte Aluminiumoberflächen
- Bohrungen und Kavitäten mit Lüftungslöchern, entlüftete Schrauben oder geschlitzte Scheiben
- Ohne Abdeckungen
- Montiert in unserem Reinraum
- Endgereinigt
- Lieferung in evakuierter, doppelter Kunststoffverpackung
Klicken Sie hier für mehr Systeme:
Übersicht über unsere Standardachsen
Sie suchen eine technische Lösung für Ihre Anwendung?
Jetzt den ersten 3D Entwurf in nur wenigen Tagen erhalten:

Elger Matthes
Beratung, Konzepte, Innovation & Engineering
T +49 351 88585-82
E-Mail

Unsere Referenzen